Diferența dintre dezechilibrul static și dinamic
Dezechilibru Static
În cazul unui dezechilibru static, centrul de greutate al rotorului este deplasat față de axa de rotație. Acest lucru creează o forță unilaterală care încearcă să rotească rotorul astfel încât partea sa cea mai grea să fie orientată în jos. Dacă rotiți un astfel de rotor cu 90 de grade, „punctul greu” se va deplasa întotdeauna în jos.
- Apare atunci când rotorul este staționar.
- Este utilizat pentru rotoare înguste, în formă de disc.
- Corectează distribuția neuniformă a masei într-un singur plan.
Dezechilibru Dinamic

În cazul unui dezechilibru dinamic, există cel puțin două deplasări de masă diferite în plane diferite. Acest lucru provoacă nu numai o forță unilaterală, ca în cazul dezechilibrului static, ci și momente care generează vibrații suplimentare în timpul rotației. Un astfel de rotor nu se rotește de la sine dacă este rotit cu 90 de grade, deoarece forțele se anulează reciproc. Acest tip de dezechilibru poate fi corectat numai dinamic.
- Apare numai atunci când rotorul se rotește.
- Este cauzat de două mase neechilibrate în plane diferite de-a lungul lungimii rotorului.
- Potrivit pentru rotoare lungi cu două axe; necesită o corecție în două plane.
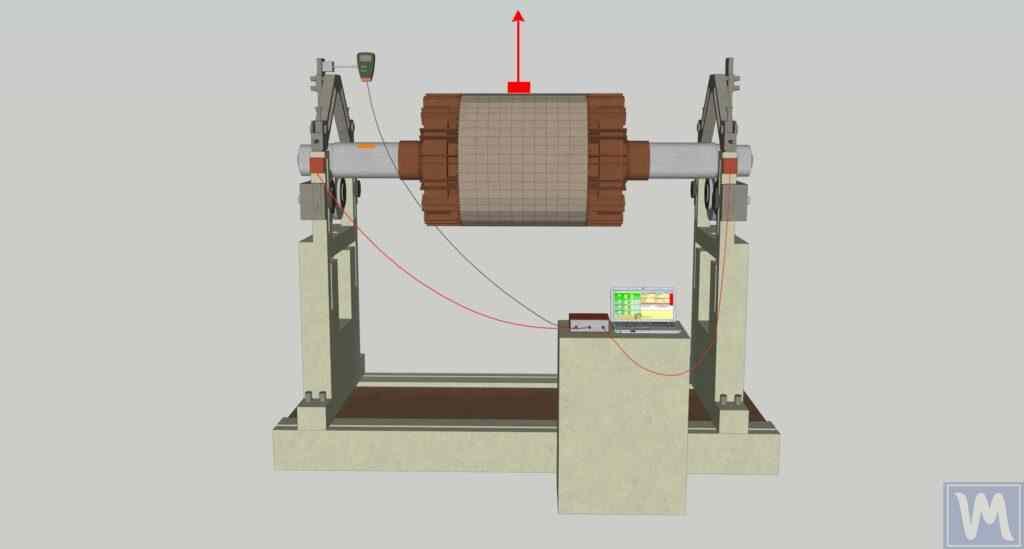
Pentru corectarea unui dezechilibru dinamic, este esențial un dispozitiv precum Balanset-1A, cu o funcție de echilibrare în două plane.